
Sensor development goes much further than just knowledge of sensor technologies. Sometimes, sensor data fusion is the key to success – for example, when you want to improve the performance of ultrasonic and Doppler radar sensors. Combining two sensors is also an affordable alternative to encoders. If you combine sensor data from multiple technologies, you can obtain more reliable measurement results. But, how do you use sensor data fusion to improve sensor performance?
David Reuijl, R&D Engineer at Sentech, conducted a research project about sensor data fusion. He combined sensor data from ultrasonic and Doppler radar sensors. This sensor combination eventually achieved a speed of some seventy times greater than when using just an ultrasonic sensor. Below, Reuijl tells you all about this sensor development project.
From encoders to sensor development
Encoders: You often find them in the high-tech industry, where they provide accurate distance measurements. Yet, in many applications, encoders are not always the best solution. Such as when measuring the distance between two vehicles or AGVs — but also when measuring the distance between a sprinkler arm and a crop. Lidar technology is suitable for vehicle applications but it is quite expensive.
Sensor data fusion as an affordable solution
Doppler radar sensors or ultrasonic sensors are alternative solutions. They each have their own advantages and disadvantages. As David Reuijl, R&D Engineer at Sentech, explains: “Ultrasonic is priced relatively low and is very good for measuring distances. It achieves a high resolution and accuracy.”
“However, ultrasonic works with sound waves, which provide a limited speed. Does it need to be faster than a couple of Hertz? Then it’s not such a good fit.” This speed limitation makes ultrasonic sensors a less appropriate fit for highly dynamic systems.
Although most types of Doppler radar sensors are priced somewhat higher than ultrasonic sensors, Doppler radar sensors are affordable. Doppler radar measures speed and not distance, but it must also be integrated. “These sensors achieve a much higher measuring frequency, yet you see little of that in practice. They have been generically designed and are therefore not tailored to measuring at high speeds,” explains Reuijl.
Reliable distance measuring using two technologies
The combination of Doppler with another type of sensor does provide a reliable distance measurement. Reuijl, the R&D Engineer, elaborates: “If we combine the signals from both sensors, we obtain a much better measurement. The measurement results are better than what one type of sensor can deliver. And the total price tag is more favorable than that of advanced technologies, such as encoders and lidar.”

David Reuijl: “We didn’t have any previous experience with sensor data fusion at this level. That’s why we started with a research project. This allows us to offer our customers a better solution in the future. I am very satisfied with the result!”
How do you select sensors for sensor data fusion?
Sensor data fusion begins with selecting the right sensors. Reuijl started with the ultrasonic sensor: “For this choice, we concentrated on the range, the communication interface, the availability and, of course, the cost. The range of ultrasonic sensors is significantly less than that of a radar sensor. We selected a sensor that limits the fusion as little as possible.”
When you combine two signals, timing is of utmost importance. After all, it is useless to add them together if they have dissimilar frequencies. “With communication, you must minimize the loss of time. This means that the interface must be analog or synchronous digital — so, SPI or IIC,” adds the R&D Engineer.
Eventually, an ultrasonic distance sensor from the British company Devantech was the best match for the requirements. Reuijl explains his choice: “This sensor takes work off our hands. The calculation of speed is done on the basis of the sound waves’ time-to-flight. This means that we spend less time on signal processing.”
Adjusting technologies to the application
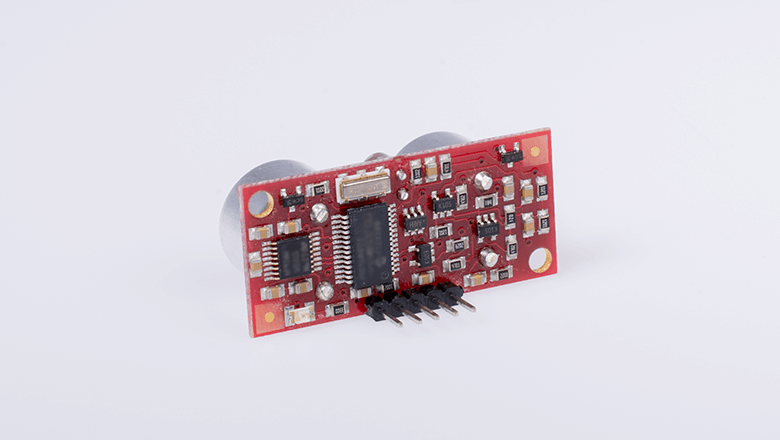
Reuijl did not find an alternative to the radar sensor. The solutions did not fit the wishes for a high measurement frequency and integrated digital signal processing (DSP). He used a Doppler radar sensor from B&B Thermo-Technik. This is an analog radar sensor that Reuijl himself adjusted for the application.
Because of the timing, integrated signal processing is necessary. If you collect the signals from both sensors in an operating system that doesn’t run in real time, such as Windows or Linux, it is difficult to have them run synchronously. “What you need is a fixed sampling time, a fixed tick. We work with an embedded platform. The signal processing is conducted by us directly, and close to the source,” explains Reuijl.
With the development board from STMicroelectronics, Reuijl collected the sensor data via an IIC interface to guarantee speed and a constant sampling time.
Conditioning signals
Before the analog signals from the radar sensor were able to be used, the R&D Engineer had to condition them. “The signals were too weak. They had a relatively large DC gain. We had to use a high-pass filter in order to avoid aliasing problems. To do this, we developed a band-pass filter with adjustable gain and DC offset.
The signals were converted to the frequency domain using a fast Fourier transform (FFT). Reuijl explains: “Although the Arm Cortex micro-controller on the development board has a module for FFT in its library, it remains a calculation-intensive task. The more accurately you want to measure, the larger the array of samples must be. So, the calculation takes longer. Here, we took into consideration that this will probably turn out differently in future practical applications. Now we selected a speed resolution of approximately 0.2 kilometers per hour and a measuring frequency of 1 kHz. That is twenty times faster than the quickest digital radar sensor we found on the market.”
Combining signals with a fusion platform
After improving the signals of both sensors, they were combined. The R&D Engineer chose a separate fusion platform with a lot of computing power and peripheries. “We expect to use this platform more often in the future,” explains Reuijl. He selected the development board based on a Cortex M7 micro-controller from STMicroelectronics.
Reuijl adds: “Using this fusion platform, we collected the sensor data via an IIC interface. This allowed us to guarantee speed and a constant sampling time.” The R&D Engineer used a complementary filter to combine signals. With such a filter, you don’t need a group of sensors to obtain a good output.
“In addition, this solution does not require you to use sensors that measure the same physical quantity — because it can also work with derivatives. This is important because we are trying to improve the position measurement of the ultrasonic sensor using the speed measurement of the radar sensor,” says Reuijl. Another option was a Kalman filter. But that is more difficult to implement and offers extra functionalities that are not needed at this time.
The analog signals from the radar sensor were initially too weak, so the R&D Engineer conditioned them.
High-pass filter for optimum measurement results
The radar signal was integrated numerically. That’s how measuring points were detected between the steps in the ultrasonic signal. Unfortunately, stubborn integration errors would compound so Reuijl included a high-pass filter in the implementation. In that area of high frequency, radar technology functions best. The ultrasonic signal, in turn, is good at low frequencies, so a low-pass filter was applied there.
Optimum performance of ultrasonic and Doppler radar sensors
The project was a success! The weak spots of the ultrasonic sensor were augmented with the output from the radar sensor. The speed of the combined sensors is some seventy times greater than when only an ultrasonic sensor is used.
This also significantly improves the resolution of the distance measurement. “This is not true for all frequencies,” Reuijl emphasizes. “If you do a static measurement — so there is no movement — the radar sensor provides no added value. Sensor fusion does not make sense in that case. You need to look for a different solution.”
“This time, we chose a low-priced ultrasonic sensor with a resolution of one centimeter. The fusion with the radar sensor improved that to one millimeter,” says Reuijl. “We started this research project to gain experience. If, in the future, we receive an assignment for which fusion between ultrasonic and radar is an appropriate solution, we will make new choices based on the new conditions. These choices could be the type of sensor, how we configure the filtering, how we set up the FFT, etc. I think that this sensor fusion is very interesting for motion-control applications, where lidar sensors or encoders are not suitable.”
Challenging measurements are achievable for you
Sensor development with sensor data fusion is not just an alternative to encoders — it’s a way to add value to existing measurement technologies. Challenging measurements are more achievable than ever. What is possible with sensor data fusion? And how does it help in the optimization of your machine?
Make next-generation applications accessible with sensor data fusion.

This article was published in Mechatronica & Machinebouw nr.6 2020 and is written by Alexander Pil


