De vraag is niet of maar wanneer volledig autonoom rijden op de openbare weg eraan komt. De nieuwste Tesla’s kunnen het al en Automated Guided Vehicles (AGV’s) zijn aan de orde van de dag. In de voertuigen van de toekomst komen geavanceerde technologieën samen. Welke sensortechnieken dat zijn en wat hun voor- en nadelen zijn, lees je hier.
Een vliegtuig zonder piloot, of bus zonder bestuurder is binnen afzienbare tijd mogelijk. Alleen wettelijke en psychologische bezwaren staan ons nog in de weg; net zoals de stoomlocomotief in de 19e eeuw voor controverse en uitdagingen zorgde.
“Camera’s en verschillende soorten sensoren in gefuseerde sensorapplicaties zijn de ogen en oren van de toekomstige bestuurders van onze auto’s”, voorspelt business development manager Marco Leeggangers.
De evolutie van autonoom bewegen
Autonoom rijden was een van de hoofdthema’s op de IAA Frankfurt dit jaar. De auto-industrie werkt aan technologieën die volledig autonoom bewegen in de openbare ruimte mogelijk maken.
De autowereld hanteert een schaalniveau van 0 tot 5. Nul staat voor autorijden zoals we al een eeuw gewend zijn, zonder hulpmiddelen. Niveau 5 voor een volledig geautomatiseerde autorit, terwijl jij een boek leest of film kijkt.
Volgens Leeggangers moeten vanaf 2018 alle nieuwe automodellen op niveau 2 geautomatiseerd zijn om een 4- of 5-sterren veiligheidsrating te krijgen. “De auto is dan voorzien van geavanceerde hulpsystemen, Advanced Driver Assitance Systems (ADAS). Zoals Automatic Emergency Breaking, Lane Assistance en Road Edge Detection.”
Tesla heeft de sprong van ADAS naar autonoom gemaakt in zijn nieuwste modellen. De nieuwste versie van Tesla’s Autopilot balanceert al op de grens van niveau 4 en 5.
Bedrijfsmatige toepassingen: AGV’s
Het bedrijfsleven past al langer autonoom bewegende voertuigen (AGV’s) toe voor met name distributietoepassingen. In veel distributiecentra rijden automatische heftrucks rond en vindt orderpicking plaats met robots.
Nederland leidt de innovatie op het gebied van land- en tuinbouwautomatisering met UAV’s (drones) en AGV’s (robots voor het schoonmaken van stallen, voeren van vee, en logistieke handelingen in kassen).

Waarom willen we zelfrijdende voertuigen?
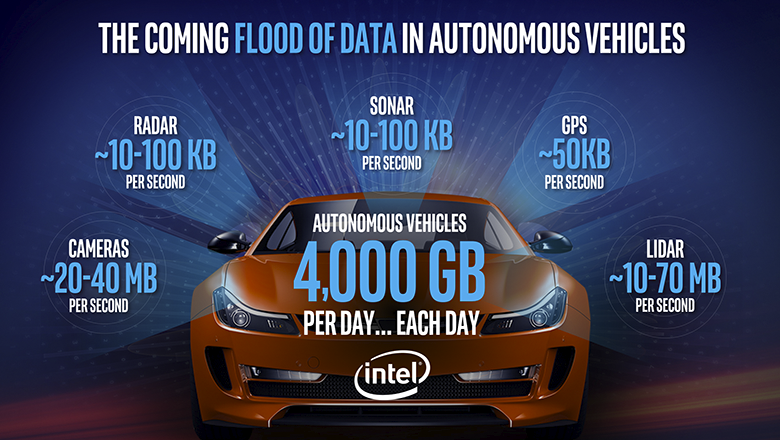
Leeggangers: “In mijn ogen is dit een logisch gevolg van de technologische evolutie. Eigenlijk past autonoom rijden wel bij de digitale revolutie, omdat grote hoeveelheden sensordata verwerkt moeten worden om zelfstandig op de omgeving te reageren. Bovendien maakt de zelfrijdende auto deel uit van het Internet of Things (IoT).”
De voordelen van autonoom bewegende voertuigen zijn legio:
- Positieve impact op de verkeersveiligheid. Geavanceerde computers kunnen menselijke taken efficiënter, beter en veiliger uitvoeren.
- Betere benutting wegcapaciteit. Zelfrijdende voertuigen rijden op kortere afstand van elkaar. Zo benutten ze de wegcapaciteit efficiënter, waardoor files afnemen en zelfs voorkomen kunnen worden.
- Betere mogelijkheden voor autodelen. Het gebruik van de zelfrijdende auto kan gepland worden zodat we hem kunnen delen. De auto voor woon-werkverkeer kan overdag voor iemand anders beschikbaar zijn. Autonoom rijden zal een impuls geven aan de voorspelde deeleconomie.
- Duurzaamheid: AGV’s doen hun taken efficiënter dan mensen en besparen in diverse branches grondstoffen en energie.
- Productiviteit: Een AGV wordt nooit moe, kan zwaardere taken aan en opereert foutloos.
- Kostenbesparing: AGV’s maken de volledige automatisering van distributieprocessen mogelijk. Ook in de land- en tuinbouw helpen rijdende robots kosten te beperken.
Detectie-uitdagingen voor afstandsmeting en positiebepaling
Om een voertuig autonoom te laten rijden heeft het een alomvattend beeld van de omgeving nodig. Voor het dynamisch genereren van een omgevingsbeeld zijn er vier detectie-uitdagingen.
- 1. Het bepalen van de vrije berijdbare ruimte op het wegdek.
- 2. Het bepalen van de geografische rijroute via de berijdbare ruimte.
- 3. Het signaleren van bewegende objecten (andere weggebruikers en bewegende obstakels).
- 4. Het signaleren en interpreteren van wegsignalering, zoals verkeersborden, verkeerslichten, wegmarkering en andere visuele aanwijzingen.
Sensortechnologie is tegenwoordig zo ver gevorderd dat er voor alle detectie-uitdagingen oplossingen zijn.
Detectiemiddelen voor autonome voertuigen
Voor autonoom rijden en geavanceerde rijhulpmiddelen worden vooral radar-, lidar- en sonarsensoren toegepast. Gecombineerd met camera’s en GPS tast een voertuig zo zijn omgeving dynamisch af. Slimme software verwerkt de grote hoeveelheid data, waardoor het altijd weet waar het zich bevindt ten opzichte van objecten.
Deze technieken zijn mogelijk doordat processoren steeds krachtiger en kleiner zijn geworden.
Ontwikkeling sensortechnologie
Leeggangers geeft aan dat Sentech een rol speelt bij de ontwikkeling en R&D van sensortechnologie voor AGV’s. “Wij passen bijvoorbeeld al radar, lidar en ultrasoon toe in afstandssensoren en oriëntatiesensoren. Als onafhankelijke sensorintegrator werken we nu aan de integratie van radar en lidar in compacte ‘gefuseerde’ sensortoepassingen.”
Volgens de business development manager leidt sensor fusion tot slimmere en betere klantapplicaties, specifiek op het gebied van autonoom bewegen.
Voor- en nadelen sensortechnieken
De meest veelbelovende sensortechnieken voor zelfrijdende voertuigen zijn lidar en radar. Lidar tast de omgeving af met licht (laser of infrarood), terwijl radar dat met radiogolven doet. “De ontwikkeling van lidar en radar gaat heel hard. Dat komt doordat processorchips steeds kleiner worden en de techniek betaalbaarder is geworden,” aldus Leeggangers.
Lidar heeft grote voordelen bij remote sensing. Een daarvan is de hoge resolutie, die nodig is voor het nauwkeurig kunnen detecteren van stilstaande en bewegende objecten. Daarentegen hebben weersomstandigheden als mist en regen een grotere negatieve invloed op de nauwkeurigheid. “Lidar is geschikt voor het waarnemen van bewegende objecten in de directe nabijheid van een voertuig”, legt Leeggangers uit.
Radar kan verder kijken, maar met het toenemen van de afstand neemt de nauwkeurigheid af. Daarom is volgens hem radar geschikter voor het op afstand waarnemen van bewegende objecten voor het voertuig.
De toekomst van zelfrijdende voertuigen
“Bijzonder is dat de technologische visies van autofabrikanten onderling verschillen. De een heeft een voorkeur voor lidar, de ander voor radar. De autofabrikanten hebben een sensor-based-systeem als uitgangspunt gemeen. Wij zien een toekomst met geavanceerde fusiesensoren in geïntegreerde sensorapplicaties”, zegt Leeggangers.
Hij ziet ook nieuwe spelers op de markt voor autonoom rijden met een andere technologische insteek, zoals Google en Intel. Google heeft een eigen 3D-technologie ontwikkeld, op basis van route-informatie en 3D-kaarten.
Intel, de processorfabrikant, heeft zich met de overname van Mobileye op de markt voor autonoom rijden gestort. Het technologieconcern verwacht in 2021 zijn eerste zelfrijdende auto op de openbare weg. Intel gebruikt de meest geavanceerde visuele technologie (camera’s en software) in voertuigen voor het waarnemen van de omgeving.
Leeggangers verwacht echter dat sensoren altijd belangrijke schakels blijven in de technologie voor autonoom bewegen. “Je zult altijd redundante sensorsystemen nodig blijven hebben, als aanvulling op camera- of GPS-systemen. Hoe geavanceerd ook, alles kan stuk. Redundantie wordt dus steeds belangrijker naarmate het wagenpark evolueert richting volledige autonomie en verkeer zonder bestuurders.”
Meer over de ontwikkeling van lidar en radar
Sentech zet sterk in op de doorontwikkeling van lidar- en radarsensoren, met de nadruk op sensor fusion. Dit zijn de meest geschikte sensoroplossingen voor autonoom bewegen in de openbare ruimte en bedrijfsmatige omgevingen.
Sensor fusion is dé ultieme vorm van integratie en maakt next-generation automotive toepassingen mogelijk.
Lees er meer over en laat je in de goede richting sturen.