
Een inductive encoder meet een verplaatsing, ten opzichte van een target. De verplaatsing wordt vertaald naar een beweging. Zo’n lineaire encoder detecteert contactloos, meet tussen de 5 en 15 µm (micrometer) nauwkeurig en is ongevoelig voor (elektro)magnetische velden van buitenaf. Naast inductive encoders zijn er ook andere technieken verkrijgbaar. Het kan een uitdaging zijn om de juiste techniek te selecteren. Welke encoder past het beste bij jouw toepassing en omgeving?
Onder R&D engineers is de inductive encoder nu nog onderbelicht. Dat is opvallend, want deze robuuste techniek kan een goede optie zijn voor jouw applicatie. De miniatuur encoders functioneren goed in vervuilde omgevingen en bij hoge temperaturen tot 125 °C. Bovendien zijn ze ten opzichte van optische en magnetische encoders prijstechnisch interessant.
Hoe werkt een inductive encoder?
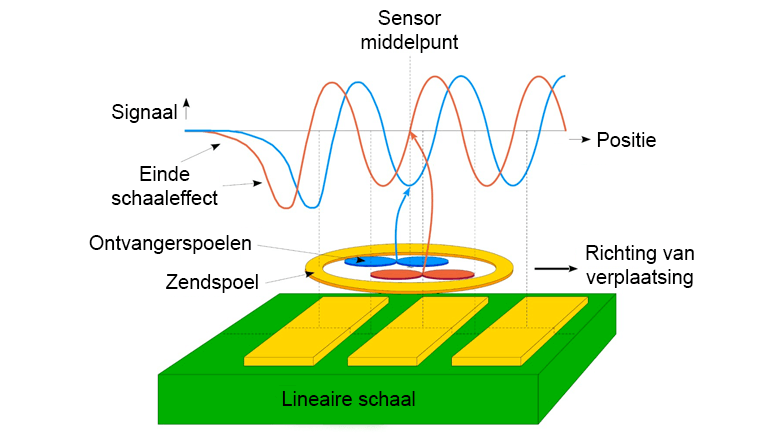
Een inductive encoder detecteert een lineaire of roterende verplaatsing, ten opzichte van een target. Dit type sensor reageert op de aanwezigheid van ferromagnetisch of elektrisch geleidend metaal in een target. De roterende of lineaire encoder bevat een zendspoel met daarin vier ontvangerspoelen. Deze zendspoel genereert een elektromagnetisch veld.
Wanneer een koperen (elektrisch geleidend metaal) object het elektromagnetisch veld betreedt, wordt dit veld onder de encoder gemanipuleerd. De ontvangerspoelen detecteren deze manipulatie en zetten de meting om naar een beweging. Oftewel, een digitaal uitgangssignaal.
De encoder wordt over een target met koperen markeringen bewogen. Met een repeterend patroon, ziet de verhouding er zo uit; de breedte van iedere markering is twee derde, de breedte van de tussenruimte is een derde. Samen vormen deze afmetingen de periodelengte. Het systeem zet de beweging om in een analoog signaal, in de vorm van een sinus en een cosinus. Hierna wordt het analoge signaal in de encoder gedigitaliseerd in de vorm van een blokgolf.
Met interpolatie wordt de relatief grote periode stap (1,2 mm) gereduceerd tot vele kleine digitale stappen. In het geval van een inductive encoder, kun je met interpolatie zelfs resoluties behalen kleiner dan 1 µm.
Roterende of lineaire encoder
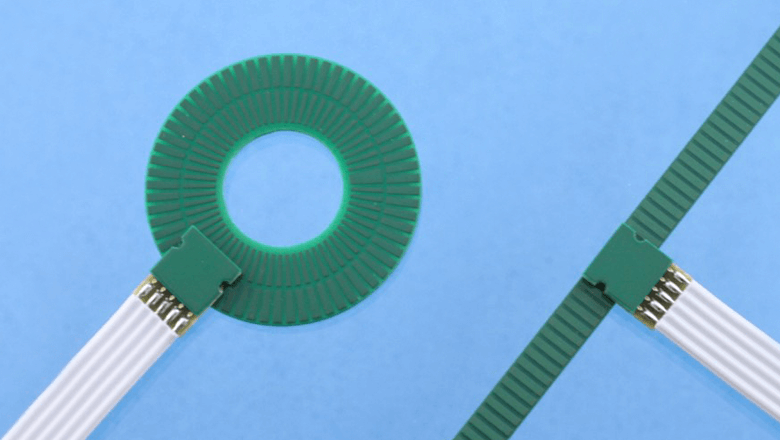
Afhankelijk van de gewenste beweging, is er een mogelijkheid om te kiezen voor een lineair of roterend encodersysteem.
Inductive encoder beweegt over een target met koperen markeringen. De lineaire encoder zet de beweging om in een analoog signaal.
Magnetische en elektromagnetische storingen uitschakelen
Een manier om magnetische en elektromagnetische storingen van buitenaf te elimineren, is het gebruik van een ontwerp met multi-spoel ontvangers. De spoelen werken in paren en zijn in tegenfasen op elkaar aangesloten. Wanneer een storingsveld in de ene spoel wordt opgewekt, wordt dit veld identiek in de andere spoel gegenereerd. Omdat de encoder alleen het verschilsignaal meet, wordt het storingsveld geëlimineerd.
Dat werkt als volgt: De ontvangerspoelen zijn in tegenfasen op elkaar aangesloten. Wanneer een storingsveld in de ene ontvangerspoel wordt opgewekt, wordt deze exact in tegen fase uitgeschakeld door exact hetzelfde storingsveld in de andere winding.
Een fabrikant die hier gebruik van maakt, is onze partner POSIC. Zij zijn gespecialiseerd in het ontwikkelen en produceren van inductive encoders.
Halfgeleider technologie
Bij de fabricage van een inductive encoder wordt gebruik gemaakt van halfgeleidertechnologie. Dankzij deze techniek is het systeem klein van formaat, gecombineerd met een hoge meetnauwkeurigheid.
5 voordelen van een inductive encoder
Op basis van omgevingsfactoren, bepaal je welke techniek geschikt is voor jouw toepassing. Of je nu een roterende of lineaire encoder zoekt, dit zijn 5 redenen om te kiezen voor een inductive encoder.
- Compacte bouwvorm
Inductive encoders zijn erg klein. Ze hebben een maximale lengte van 11 mm en zijn maximaal 0,9 mm dik. In compacte ontwerpen zijn de miniatuur encoders makkelijk te integreren. - Nauwkeurige metingen
Dankzij zijn hoge resolutie detecteert een inductive encoder op de µm (micrometer) nauwkeurig. Met interpolatie wordt de resolutie vergroot. Door deze methode meet hij in zeer kleine stapjes. De hoogst haalbare resolutie is 0,02 µm, oftewel 20 nm (nanometer). - Ongevoelig voor storingen van buitenaf
Magnetische en elektromagnetische velden die worden gegenereerd door bijvoorbeeld elektrische motoren, kunnen het elektromagnetische veld van de encoder verstoren. Omdat de inductive encoder van POSIC differentiële ontvangerspoelen bevat, is hij niet gevoelig voor storingen van buitenaf. Hierdoor kan dit systeem worden ingezet als positieterugkoppeling in bijvoorbeeld (elektro)motoren. - Groot temperatuurbereik
Met een groot temperatuurbereik is de inductive encoder bestendig bij temperaturen tussen -40 en 125 °C. Daarom is hij geschikt voor toepassingen met temperaturen boven de 70 °C. Extra (mechanische) maatregelen om de encoder te beschermen tegen de warmte, zijn hierbij niet nodig. - Ongevoelig voor vuil
Omdat inductive techniek detecteert met elektromagnetische velden, is hij niet gevoelig voor vuil zoals stof, vocht en olie. Dit maakt de robuuste encoder uitermate geschikt voor het gebruik in vervuilde omgevingen.
Kenmerken
De eigenschappen van een inductive encoder lopen uit een:
-
A quad B + index → incrementele encodersignalen A en B in kwadratuur en index.
-
Seriële interface → communicatie met interfacekaart en met ASSIST via USB voor eenvoudige kalibratie via PC. Dit is optioneel.
-
Eenmalig programmeerbaar geheugen om configuratiegegevens in op te slaan. Om de prestaties van de encoder te verbeteren, is het ook mogelijk om een LookUp Table te programmeren. Deze optie is optioneel.
-
Interpolatie → programmeerbaar tot x16.384, lineaire resolutie tot 0,02 µm.
-
LookUp Table ter compensatie van niet-lineariteit na montage in de toepassing.
Toepassingsgebieden van inductive encoders
Een inductive encoder past in diverse toepassingsgebieden. Je ziet de technologie vaak terug in combinatie met omgevingsfactoren, zoals storingen door (elektro)magnetische velden van buitenaf, vervuilde en vochtige omgevingen.
Elektromotoren
In een elektromotor kan een inductive encoder een verdraaiing meten. Hierbij detecteert hij de stappen van de verdraaiing en koppelt dit terug naar de besturing van de motor.
Doordat de encoder ongevoelig is voor magnetische velden van buitenaf, werkt deze techniek probleemloos in deze toepassing. Daarnaast vormen ook stof, gruis en vocht geen bedreiging voor de inductive encoder.
Zoals je eerder in dit artikel leest, is deze encoder geschikt voor elektromotoren door zijn ongevoeligheid voor (elektro)magnetische velden van buitenaf.
Mobiele apparatuur
Voor mobiele apparatuur die batterij gevoed zijn, kan een inductive encoder een uitkomst zijn dankzij zijn lage stroomverbruik en kleine formaat. Daarom wordt de techniek gebruikt in bijvoorbeeld gyroscopen. In een toepassing zoals deze, registreert de encoder de positie en zorgt voor de terugkoppeling ervan.
Gyroscopen worden vaak gebruikt in vervuilde omgevingen zoals bouwplaatsen. Doordat de encoder ongevoelig is voor vuil, heeft dit geen invloed op de uitvoering. Bovendien zorgt de hoge resolutie voor een extreem nauwkeurige meting.
Gemotoriseerde zoom
Ook kan een inductive encoder worden ingezet om de zoomfunctie van een camera te automatiseren. Hij detecteert de positie van de gemotoriseerde zoom.
Bij deze toepassing is het van belang dat dit type sensor klein van formaat is. Er wordt een cilindervormige target gebruikt omdat het gaat om een roterende beweging.
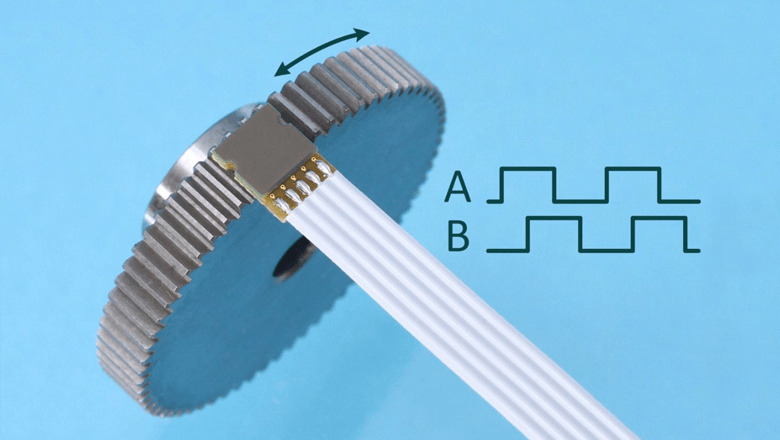
Direct op tandwiel meten
De rotatie van een tandwiel kan direct op het wiel worden gemeten, zonder dat daar een target voor nodig is. Het tandwiel moet wel van ferromagnetisch staal zijn. Ook hierbij kan de resolutie worden verkleind door interpolatie, tot 16.384 keer per tand.
Verschillen tussen optische, magnetische en inductive encoders
Naast inductive encoders, zijn er ook optische en magnetische encoders verkrijgbaar. De toepassing van deze drie typen technieken ligt dicht bij elkaar. Alle drie detecteren ze een verplaatsing ten opzichte van een target. Ze verschillen in nauwkeurigheid, robuustheid en prijs.
Optische encoders
Optische encoders detecteren met behulp van licht. De target bevat contrasten van licht (reflecterend materiaal) en donker. Over dit target beweegt een lichtbron, die het lichtsignaal omzet naar elektronische spanningspulsen.
Ten opzichte van inductive techniek, zijn metingen van optische techniek nauwkeuriger. Omdat ze werken op basis van licht, zijn ze gevoeliger voor vervuiling. Dit maakt optische encoders minder geschikt voor toepassingen onder vervuilde omstandigheden. Daarentegen is chromatic confocal inzetbaar, als je tot op de nm (nanometer) resolutie een positie wil controleren.
Magnetische encoders
Bij magnetische encoders, zoals (MR) Hall-sensoren, is het target opgebouwd uit permanente magneten. De encoder meet de verplaatsing via de elektromagnetische velden van het target. Omdat het systeem werkt op basis van magnetisme, zijn ze ongevoelig voor vervuiling.
Magnetische encoders zijn gevoelig voor (elektro)magnetische velden van buitenaf. Deze velden veroorzaken storingen, zoals meetfouten en hermagnetiseren van targets.
Past een inductive encoder in jouw applicatie?
Een inductive encoder biedt veel mogelijkheden. Zo zijn omgevingsfactoren als stof, vocht, olie en (elektro)magnetische velden van buitenaf geen belemmering voor dit type sensor.
Vraagt jouw applicatie om een robuuste techniek die nauwkeurig en contactloos detecteert?

.png)

