
When you start searching for the right encoder you’ll find plenty to choose from. Does your application require an incremental or an absolute encoder? And will you opt for inductive, capacitive, or optical technology? Later in your search you must also decide which shape sensor is the right fit for your situation… All in all, there are many aspects to consider, so some help is welcome.
Absolute encoders have been around for years. Meanwhile, the capabilities of this type of sensor are rapidly expanding. Sean Ram, Account Manager at Sentech, knows all about this: “Especially rotating absolute encoders have shown significant advancements.”
“For example, you have a choice of technology as well as model. Which encoder fits your application depends on the specific application. Here, of course, we also determine whether the investment is cost-effective,” adds Sean.
Encoders: absolute vs. incremental
Whereas absolute encoders give an absolute position, incremental encoders measure the changes in the position. With each movement, they count the number of steps the encoder moves.
Such an incremental system requires a fixed reference point to arrive at an absolute position measurement. “Incremental encoders are less suitable for applications that involve fast movements. If they miss a pulse, they lose track of their position,” explains Sean.
“An absolute encoder can sometimes be wrong, but this can be easily corrected at the next measurement point. That’s why the control of a motor with an incremental system is very different from one with an absolute system.”
What does your application need?
Can a reference point be added to your system? If so, then an incremental encoder is often an appropriate solution. “If homing is not possible in your application, such as for safety reasons, then you often end up with an absolute system,” Sean says.
Rotating encoders for robotic applications
Absolute and incremental encoders are available in linear and rotating models. Sean has noticed an increased demand for rotating absolute encoders. “We see that more and more customers are building their robots from scratch.”
“You see it in the medical sector and in agriculture and horticulture, for example. Companies everywhere are developing their own robot solutions — with one degree of freedom in some situations but, even then, the rotation must be precisely measured. That is because such systems often work with brushless motors. When starting up, these types of motors want to know precisely where the coil is located in relation to the magnets. This enables them to properly regulate the control. And you need an absolute position for that.”
What’s more, an increasing number of Dutch companies use a combination of automated guided vehicles (AGVs) and robots. Sean sees that companies are then building the system themselves: “They need a specific solution, so a ready-made system is not a good fit for them. Often, they already have the capacity to build such a system in house, so that also makes this route more cost-effective.”
Rotation solution
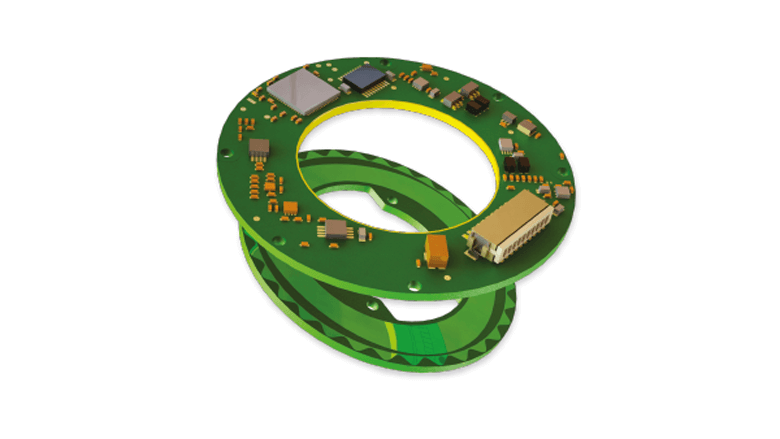
Systems such as robots usually involve many rotations. In these situations, a hollow-shaft encoder can provide the solution. “That is a ring-shaped encoder with an open interior. You pull the cables for data signals and power through the interior of the system,” explains Sean.
Hollow-shaft encoders are made of two parts — a transmitter and a receiver — that are each able to rotate without making contact. Sean sees another benefit in this solution: “The parts don’t come in contact with each other, so the components don’t experience wear. Traditional absolute encoders with shafts and bearings do show wear.”

Advantages and disadvantages of absolute encoders
As far as absolute encoders are concerned, there are many models and technologies on the market. They all work just a bit differently. Each one has its advantages and disadvantages.
In broad terms, one of the encoder components has electronics on board and generates a field. This field can be magnetic inductive, electrical capacitive, or optic. The other part of the encoder is passive and influences the field. The ensuing interference is measured, providing information about the angular rotation.
Specifically, the passive encoder part has a pattern, and that pattern has a unique coding — and therefore a unique interference — over the entire 360 degrees. This enables the system to always know at which angle the encoder is located.
Gradations of accuracy
The accuracy of an encoder varies by technology and brand, Sean knows. “For the integration of inductive encoders, we often use Zettlex, from Celera Motion. It accurately measures to approximately 0.01 degrees. If we are working with capacitive encoders, we often select Netzer. Their encoders have an accuracy of no less than 0.005 degrees.
Then there is a third type of encoder, which uses optical technology. “Optical encoders from Celera or MicroE achieve an accuracy that is comparable to capacitive encoders,” Sean states.
But it’s not all about precision, Sean emphasizes. “There are other factors that play a role here. Eventually, the application determines which technology fits best.”
When do you select which encoder?
Ambient conditions play a large role in your choice of encoder type. “Are you dealing with a clean environment? And has the encoder been installed in such a way that it cannot be contaminated by dirt? Then an optical encoder can be a good solution. Such an encoder is light and relatively inexpensive, and it achieves high performance.
But an optical encoder is not suitable in situations involving contamination such as dust. “In less clean applications, you often end up with a capacitive encoder from Netzer,” according to Sean.
However, capacitive technology is sensitive to moisture; moisture particles can disrupt the capacity. That’s why Sean usually selects inductive encoders for moist environments: “These are even suitable for situations like a remote-control submarine located 500 meters under water.”
Calibration
What do you need to pay attention to when integrating absolute encoders? “This type of encoder consists of two separate parts that you must correctly position in relation to each other. No matter how accurately you work, it’s easy to make a mistake,” according to Sean.
“For the ventilation slot and the non-eccentricity of the rings, you need to consider precision to a tenth of a millimeter. These are familiar specifications for many companies. Some partners, such as Netzer, help you by building in a calibration run. The two parts test each other’s position so you can correct any installation errors in a relatively easy manner.”
Assembly near motors
In general, encoders are located deep in a machine, close to the motor. What effect do the motor’s strong magnetic fields have on the encoder measurement?
“All technologies are insensitive to external interference fields. This is because developers modulate the signal between the two parts in a smart way, opting for different frequencies. This puts an end to interference by external magnetic fields,” explains Sean.
Moreover, the encoders are very flat and lightweight. “This technology is therefore highly suitable for high-speed robots, where every gram counts.”
Comparing optical, inductive, and capacitive encoders
Each family of encoders has its own advantages and disadvantages. Just think of properties such as resolution, accuracy, and sensitivity to contamination. These are the properties that make a sensor technology suitable — or not — for your application. When do you use which encoder?
Use this infographic to compare optical, inductive, and capacitive encoders
This article was published in Mechatronica & Machinebouw nr.3 2021 and is written by Alexander Pil
.png)

