Robotchirurgie is here to stay. Met de bekende Da Vinci-operatierobot van Intuitive als inspiratiebron is er een hele industrie ontstaan rondom de ontwikkeling van robotsystemen voor operatiekamers en ziekenhuizen. Cambridge Medical Robotics is een van de grotere speler en haalde twee jaar geleden in een investeringsronde maar liefst 600 miljoen dollar op voor de doorontwikkeling van zijn Versius-operatierobot. Ook in het vergelijkbare Hugo-systeem van Medtronic wordt heel veel geld gepompt.
Dat kapitaal is heel hard nodig, weet Stefano Stramigioli, professor Advanced Robotics aan Universiteit Twente. ‘Het is namelijk heel leuk dat we een slimme computer hebben getraind die Go kan spelen, maar we zijn nog heel ver verwijderd van een robothand die de behendigheid van een menselijke hand kan overtreffen. Die is er niet en dat gaat binnenkort ook niet lukken’, aldus de geboren Italiaan.
Homunculus
Om de complexiteit van de menselijke hand te illustreren, verwijst Stramigioli naar de motorische homunculus uit de neurowetenschappen. Daarin wordt elke motorische beweging in het menselijke lichaam gekoppeld aan het gebied in de hersenen dat hiervoor is gereserveerd. En wat blijkt: onze handen nemen disproportioneel veel ruimte in beslag. Als je zo’n zelfde representatie zou maken op basis van zintuigen, zijn het opnieuw de handen die eruit springen; uiteraard nu samen met mond, ogen, oren en neus.
Stramigioli vindt het dan ook niet verwonderlijk dat een bedrijf als Boston Dynamics allerlei coole filmpjes kan posten over de halsbrekende moves die hun robots kunnen uitvoeren, maar dat de ‘handen’ van die systemen nauwelijks meer zijn dan stompjes. Ja, er zijn robots die zo handig zijn dat ze kunnen tafeltennissen, maar laat een robot eens een bed opmaken. Of nog uitdagender: een zeer precieze operatie uitvoeren. ‘Met een robothand met gevoel iets doen met een onbekend object? Vergeet het maar’, weet de Twentse professor.
Fysieke interactie uitdagend
En daar zit gelijk de grootste uitdaging voor Stramigioli en zijn medeonderzoekers van de UT. ‘In de chirurgie draait het juist om die fysieke interactie’, schets hij het probleem. ‘Kijk, diagnostiek draait puur om de data. Zo kun je bijvoorbeeld in de radiologie perfect gebruikmaken van allerlei algoritmes en data-analyses. Maar de chirurgie met al zijn interacties, dat is echt andere koek.’
Stramigioli kijkt verder dan robotoplossing à la de Da Vinci, Versius en Hugo. ‘Ik vind dat standaard robotica waarin de capaciteiten van de mens – die vanwege de complexiteit van de situatie overigens nog lang niet kan worden vervangen – worden gekoppeld aan de voordelen van robots die preciezer kunnen werken en waarmee je trillingen kunt wegfilteren. Dat concept van een getelemanipuleerd systeem met rigide instrumenten heeft zeker toekomst’, denkt Stramigioli, maar hijzelf kijkt liever naar andere oplossingen.
Flexibele robot
Het onderzoek aan de UT naar medische robotica leunt, wat Stramigioli betreft, op vier belangrijke doelen. De eerste is opleiding. ‘Chirurgen moeten immers in staat zijn de tools te gebruiken. De simulatoren die je nu kunt kopen om chirurgen te trainen, zijn echter heel complex en duur waardoor ze niet alom beschikbaar zijn’, vertelt Stramigioli. UT-onderzoekers werken daarom aan een toegankelijk systeem waarmee chirurgen kunnen trainen met een endoscoop. ‘Het is bijna serious gaming want je koppelt het thuis aan je tv en je kunt ermee oefenen.’
Serieuzer wordt het als Stramigioli begint over minimaal invasieve chirurgie. ‘Vroeger zeiden ze: “grote operatie, grote sneden”, maar dat paradigma is helemaal omgedraaid. Hoe minder je in een menselijk lichaam hoeft te snijden, hoe beter het is’, zegt Stramigioli. Tegenwoordig worden daarom veel meer laparoscopische operaties uitgevoerd waarbij de instrumenten via kleine incisies in het lichaam worden gestoken.
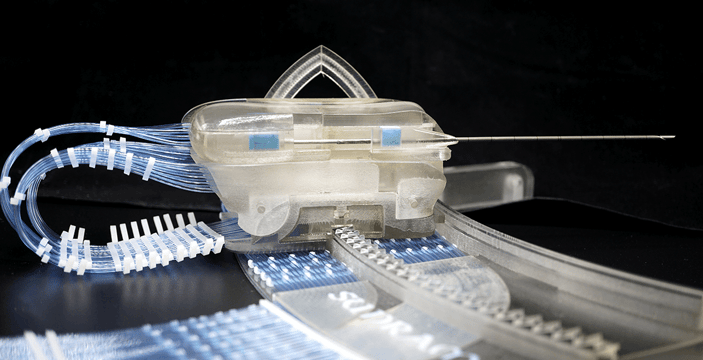
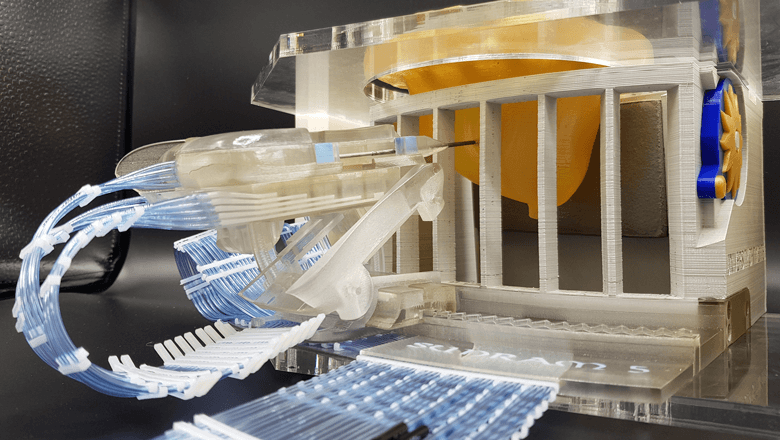
Maar Stramigioli ziet ook andere routes. Het kan namelijk ook endoluminaal, waarbij de instrumenten via de natuurlijke kanalen van het menselijk lichaam zoals de slokdarm of het darmkanaal worden ingebracht. ‘Daarvoor ontwikkelden we robotoplossingen - zoals ons Teleflex-systeem - die niet rigide maar flexibel zijn omdat ze moeten kunnen meebewegen met hun omgeving. Erg nuttig in bijvoorbeeld de oncologie.’
MRI-compatibele aandrijfoplossingen
Pneumatisch actuatiesysteem
De derde pijler is interventionele radiologie. Om patiënten inwendig te onderzoeken, hebben artsen de keuze uit een CT-scan, röntgenfoto’s en MRI. Die laatste imagingtechniek geniet de voorkeur omdat MRI geen ionisatie veroorzaakt wat veel voordelen biedt voor de patiënt. De uitdaging van MRI is dat je met een heel sterk magneetveld moet werken. Standaard robottechnieken, met al hun metalen, kunnen dus niet worden ingezet.
Aan de UT hebben onderzoekers een oplossing bedacht. ‘We hebben een gepatenteerd actuatiesysteem ontwikkeld dat volledig pneumatisch werkt’, vertelt Stramigioli. De technologie is op dit moment gericht op borstoncologie en wordt in samenwerking met Machnet Medical Robotics vervolmaakt. Het is een telemanipulatiesysteem waarbij een naald wordt gestuurd door een MRI-compatibele aandrijving.
‘Het zou een grote omslag betekenen in de behandeling van borstkanker’, stelt Stramigioli. ‘Je kunt namelijk een naald heel nauwkeurig sturen naar de locatie van de tumor omdat je continu ziet waar je bent gebleven. Vanaf de kop van de naald kun je dan de cellen doden, bijvoorbeeld met een laser of met extreme kou. Als de kankercellen zijn gedood, trek je de naald er weer uit en klaar.’
Klinische tests
Stramigioli denkt nog groter: ‘Het is mijn visie dat een vrouw die nog niet eens weet dat ze borstkanker heeft, naar het ziekenhuis gaat en een paar uur later volledig genezen weer naar buiten loopt. Dat klinkt misschien als sciencefiction, maar dat is het niet. Er zijn namelijk al methodes om tissue te analyseren, door er met een naald in te prikken. Dan kun je achterhalen of de tumor kwaadaardig is of niet. En via dezelfde fiber kun je de cellen met een laser ableren.’
Via Machnet wordt de MRI-compatibele aandrijving klaargemaakt voor de markt. Met een startinvestering uit Canada gaan de eerste klinische tests binnenkort van start. ‘We hopen dat we het over een paar jaar kunnen lanceren’, zegt Stramigioli. ‘Daarna willen we ook een vergelijkbare oplossing maken voor endovasculaire ingrepen, omdat het navigeren met een katheter door een ader hetzelfde aandrijvingsconcept vergt.’
3D-geprinte sensoren
De vierde belangrijke factor in het Twentse onderzoeksprogramma rond medische robots draait om intelligente materialen. Meer specifiek, om de combinatie van additive manufacturing en geleidende materialen. ‘Als je het printmateriaal doopt met die geleidende materialen kun je sensoren printen’, weet Stramigioli. Dat is bijvoorbeeld interessant voor patiëntspecifieke protheses. ‘Met MRI maak je eerst een plaatje zodat je de exacte informatie van de patiënt beschikbaar hebt en een prothese op maat kunt printen. Daarin kun je ook een krachtsensor printen om de belasting op de prothese te registreren.’
De technologie is nog volop in ontwikkeling, maar Stramigioli ziet de mogelijkheden al voor zich. ‘Het is nu vooral wachten op een bedrijf dat het serieus oppikt. Dan kun je echt aan een roadmap kan werken.’
Sensoren voor locatiebepaling
Gevraagd naar de sensortechnologie die nodig is voor zijn onderzoeksprojecten, wijst Stramigioli naar geavanceerde oplossingen voor locatiebepaling. ‘In drones zie je al steeds meer imaging omdat camera’s en rekenkracht hoegenaamd niks meer kosten.’
Hij vertelt over het Canadese NDI dat een soort GPS-techniek voor in het lichaam heeft ontwikkeld. Een kleine EM-microsensor kan op basis van een extern elektromagnetisch veld bepalen waar hij in het lichaam is. ‘Die sensoren kunnen in naalden of endoscopen om de navigatie te doen’, aldus Stramigioli. ‘Alle sensoren die helpen om te bepalen waar je bent, zijn nuttig. Als ze ook nog eens MRI-compatibel zou zijn, is dat het Ei van Columbus.’
Hoe ontwikkel je medische hulpmiddelen?
Terwijl de wereldbevolking groeit, gaat de ontwikkeling van medische apparaten razendsnel. Als Original Equipment Manufacturer (OEM) van medische hulpmiddelen heb je meer mogelijkheden dan ooit. Maar daarbij zijn er uitdagingen en factoren waarmee je rekening moet houden. Hoe kom je tot het ideale product met een betrouwbare kwaliteit én dat betaalbaar te produceren is?
In dit e-book lees je handige informatie over de 5 belangrijkste uitdagingen voor het ontwikkelen van medische hulpmiddelen en de rol van sensortechniek

.png)