De keuze is reuze, bij de zoektocht naar jouw juiste encoder. Heeft jouw toepassing een incrementele of een absolute encoder nodig? En kies je voor inductive, capacitive of optical technologie? Later in de zoektocht moet je ook besluiten welke sensorvorm het moet zijn… Veel facetten waar je wel wat hulp bij kan gebruiken.
Absolute encoders bestaan al jaren. Ondertussen groeien de mogelijkheden van de uitvoeringen van dit sensortype enorm. Sean Ram is Account Manager bij Sentech en kan hier over meepraten: “Vooral de roterende absolute encoders zijn flink vooruitgegaan.”
“Zo is er keuze in zowel de verschillende technieken als de uitvoeringen. Welke encoder bij jouw toepassing past, is afhankelijk van de specifieke applicatie. Natuurlijk kijken we hierbij ook of de investering rendabel is”, voegt Ram toe.
Absolute vs incrementele encoders
Waar absolute encoders een absolute positie geven, meten incrementele encoders de veranderingen van de positie. Zij tellen bij een beweging namelijk het aantal verplaatste stappen van de encoder.
Zo’n incrementeel systeem heeft een vast referentiepunt nodig om tot een absolute positiemeting te komen. “Incrementele encoders zijn minder geschikt voor toepassingen met snelle bewegingen. Als ze een puls missen, weten ze hun positie niet”, legt Sean uit.
“Een absolute encoder zit er wel eens naast. Dat is eenvoudig te corrigeren bij het volgende meetpunt. Daarom is de aansturing voor een motor met een incrementele of absoluut systeem heel anders.”
Wat heeft jouw toepassing nodig?
Kan er in jouw systeem een referentiepunt worden toegevoegd? Dan is een incrementele encoder vaak een passende oplossing. “Als homing in jouw applicatie niet mogelijk is, bijvoorbeeld door veiligheidsredenen, dan kom je vaak uit bij een absoluut systeem”, zegt Ram.
Roterende encoders voor robotica-toepassingen
Absolute en incrementele encoders zijn verkrijgbaar in lineaire en roterende varianten. Het valt Ram op dat de vraag naar roterende absolute encoders is toegenomen: “We zien dat steeds meer klanten hun robot van scratch af aan bouwen.”
“Dat zie je bijvoorbeeld in de medische sector en in de land- en tuinbouw. Overal ontwikkelen bedrijven hun eigen robotoplossingen. In sommige situaties met één vrijheidsgraad, maar ook dan moet de rotatie nauwkeurig worden gemeten. Zulke systemen werken namelijk vaak met borstelloze of brushless motoren. Dat soort motoren willen bij de opstart precies weten waar de spoel zich bevindt ten opzichte van de magneten. Zo kunnen ze de aansturing goed inregelen. Daar heb je dus een absolute positie voor nodig.”
Daarnaast zijn steeds meer Nederlandse bedrijven bezig met een combinatie van agv’s en robots. Sean ziet dat bedrijven het systeem dan zelf bouwen: “Ze hebben iets speciaals nodig. Een kant-en-klaar systeem sluit daar niet op aan. Vaak hebben ze de capaciteit om een systeem te maken al in huis, waardoor het ook kostentechnisch gunstiger is.”
Oplossing voor rotaties
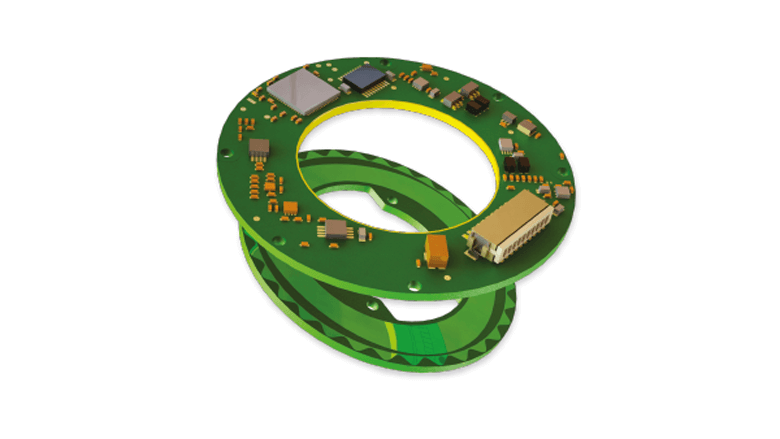
Bij systemen zoals robots heb je meestal te maken met veel rotaties. In die gevallen kan een holle-asencoder de uitkomst zijn. “Dat zijn ringvormige encoders met een open binnenwerk. De kabels voor datasignalen en voeding trek je dan door de binnenkant van het systeem”, vertelt Sean.
Holle-asencoders bestaan uit twee delen: een zender en een ontvanger die contactloos van elkaar kunnen ronddraaien. Ram ziet daarin een tweede voordeel: “Omdat de delen elkaar niet raken, slijten de onderdelen niet. In traditionele absolute encoders met assen en lagers is dat wel het geval.”

Voor- en nadelen van absolute encoders
Als het gaat om absolute encoders, zijn er heel wat varianten en technologieën op de markt. Allemaal werken ze net even anders. Ieder heeft zo hun eigen voor- en nadelen.
In grote lijnen zit het zo: één van de encoderonderdelen heeft elektronica aan boord en genereert een veld. Dat veld kan magnetisch-inductief, elektrisch-capacitief of optisch zijn. Het andere deel van de encoder is passief en beïnvloedt dat veld. Die verstoring wordt gemeten en geeft informatie over de hoekverdraaiing.
Het passieve encoderdeel heeft namelijk een patroon. Dat patroon heeft over de hele 360 graden een unieke codering en dus een unieke verstoring. Hierdoor weet het systeem altijd in welke hoek de encoder staat.
Gradaties van nauwkeurigheid
Hoe nauwkeurig encoders zijn, verschilt per technologie en merk weet Sean: “Bij de integratie van inductive encoders, kiezen we vaak voor Zettlex van Celera Motion. Daarmee meet je ongeveer 0,01 graden nauwkeurig. Als we werken met capacitieve encoders, kiezen we vaak voor Netzer. Die halen maar liefst 0,005 graden.
Dan is er nog een derde encodertype, namelijk optische technologie. “Optische encoders van Celera van MicroE halen een nauwkeurigheid die vergelijkbaar is met capacitieve encoders”, weet Ram.
Sean benadrukt dat het niet alleen gaat om precisie. “Er zijn meer factoren die een rol spelen. Uiteindelijk bepaalt de applicatie welke technologie het beste past.”
Wanneer kies je welke encoder?
De omgevingscondities spelen een grote rol bij de keuze van jouw encodertype. “Heb jij te maken met een schone omgeving? En is de encoder zo ingebouwd dat er geen vuil bij kan komen? Dan kan een optische encoder een prima oplossing zijn. Zo’n encoder is licht, relatief goedkoop en haalt hoge prestaties”, vertelt Sean.
Als er vervuiling zoals stof in het spel is, is een optische encoder niet geschikt.
“Bij minder schone toepassingen kom je vaak uit bij een capacitieve encoder van Netzer”, aldus Ram.
Daarbij is capacitieve technologie weer gevoelig voor vocht. Vochtdeeltjes kunnen namelijk de capaciteit verstoren. Daarom kiest Ram in vochtige omgevingen meestal voor inductieve encoders: “Die zijn bijvoorbeeld zelfs geschikt voor een op afstand bestuurbare onderzeeër die zich 500 meter onder water bevindt.”
Kalibratie
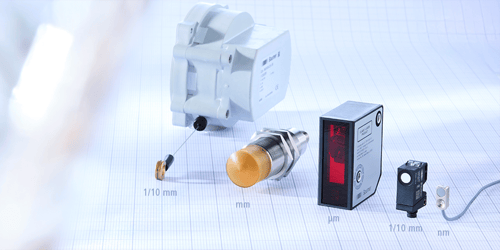
Waar moet je op letten bij de integratie van absolutie encoders? “Zo’n encoder bestaat uit twee losse delen die je – ten opzichte van elkaar – juist moet positioneren. Hoe nauwkeurig je ook te werk gaat, een menselijk fout is zo gemaakt”, aldus Ram.
“Voor de luchtspleet en de niet-excentriciteit van de ringen moet je denken aan een nauwkeurigheid van een tiende millimeter. Voor veel bedrijven zijn dat bekende specificaties. Sommige partners zoals Netzer helpen je door een kalibratierun in te bouwen. De twee delen tasten elkaars positie af en zo corrigeer je relatief eenvoudig eventuele inbouwfouten.”
Montage dichtbij motoren
Over het algemeen zitten encoders diep in een machine verwerkt, dichtbij motoren. Wat is de invloed van de sterke magnetische velden van motoren op de encodermeting?
“Alle technologieën zijn ongevoelig voor stoorvelden van buitenaf. Dat zit zo: ontwikkelaars moduleren het signaal tussen de twee delen slim en kozen voor verschillende frequenties. Storingen door magnetische velden van buitenaf zijn hierdoor verleden tijd.”, legt Sean uit.
Daarbij zijn de encoders heel plat en licht van gewicht. “Dat maakt deze technologie zeer geschikt voor robots met hoge versnellingen, waar elke gram telt.”
Vergelijk optical, inductive en capacatieve encoders
Iedere encoderfamilie heeft zijn eigen voor- en nadelen. Denk hierbij aan eigenschappen zoals resolutie, nauwkeurigheid en de gevoeligheid voor vervuiling. Dat zijn nou net de eigenschappen dat een sensortechnologie wel óf niet geschikt maakt voor jouw toepassing. Wanneer gebruik je welke encoder?
Met deze infographic vergelijk je optical, inductive en capacatieve encoders.
Dit artikel verscheen in Mechatronica & Machinebouw nr.3 2021 en is geschreven door Alexander Pil
.png)